广东工业大学团队突破仿人机器人跨步距离
2018-04-02 10:15 诚信在线
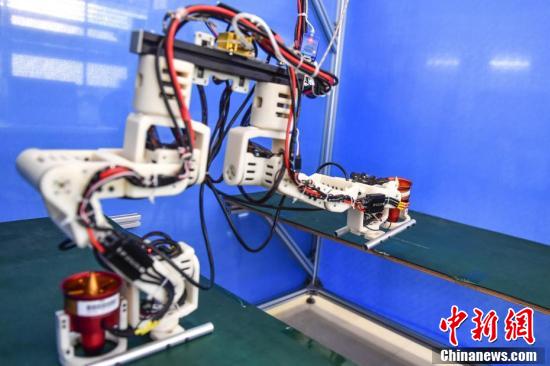
3月27日,Jet-HR1借助两只脚掌前端涵道风机引擎提供的助力跨过45厘米的沟,这一宽度达到了它腿长的97%,在其他仿人机器人研究中,该数据一般为20%。仿人机器人Jet-HR1(喷射仿人机器人1号),重6.5千克,高65厘米, 形状像人的下半身,两只脚掌前端装有形似“风火轮”的涵道风机引擎。

广东工业大学黄之峰副教授和团队的仿人机器人。
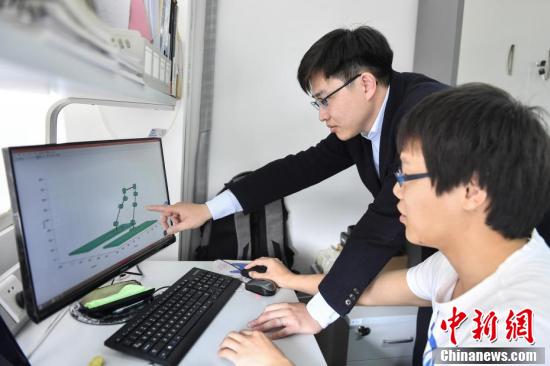
广东工业大学黄之峰副教授团队对Jet-HR1的算法数据进行调整。

涵道风机助力的方案成功使Jet-HR1能够在调整自身重心维持平衡下,跨越其他双足机器人无法跨越的宽沟。
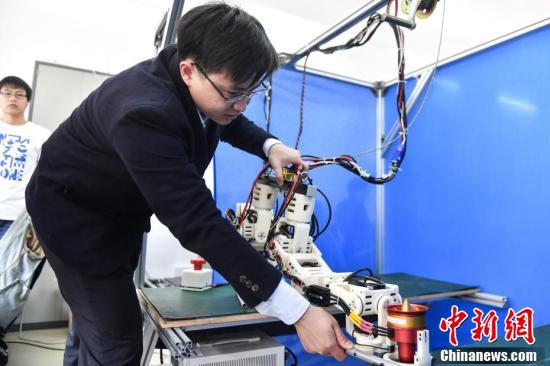
广东工业大学黄之峰副教授为Jet-HR1进行检测。 (中新社记者 陈骥旻 摄)